Massively edited this question to make it easier to understand.
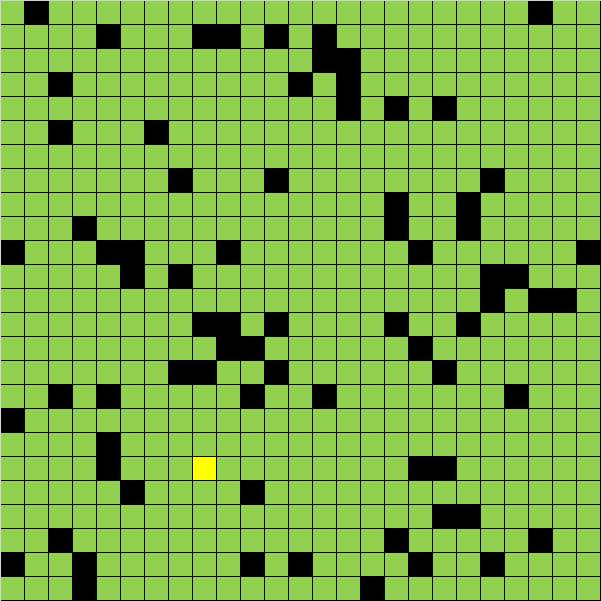
Given an environment with arbitrary dimensions and arbitrary positioning of an arbitrary number of obstacles, I have an agent exploring the environment with a limited range of sight (obstacles don't block sight). It can move in the four cardinal directions of NSEW, one cell at a time, and the graph is unweighted (each step has a cost of 1). Linked below is a map representing the agent's (yellow guy) current belief of the environment at the instant of planning. Time does not pass in the simulation while the agent is planning.
What exploration algorithm can I use to maximize the cost-efficiency of utility, given that revisiting cells are allowed? Each cell holds a utility value. Ideally, I would seek to maximize the sum of utility of all cells SEEN (not visited) divided by the path length, although if that is too complex for any suitable algorithm then the number of cells seen will suffice. There is a maximum path length but it is generally in the hundreds or higher. (The actual test environments used on my agent are at least 4x bigger, although theoretically there is no upper bound on the dimensions that can be set, and the maximum path length would thus increase accordingly)
I consider BFS and DFS to be intractable, A* to be non-optimal given a lack of suitable heuristics, and Dijkstra's inappropriate in generating a single unbroken path. Is there any algorithm you can think of? Also, I need help with loop detection, as I've never done that before since allowing revisitation is my first time.
One approach I have considered is to reduce the map into a spanning tree, except that instead of defining it as a tree that connects all cells, it is defined as a tree that can see all cells. My approach would result in the following:

In the resultant tree, the agent can go from a node to any adjacent nodes that are 0-1 turn away at intersections. This is as far as my thinking has gotten right now. A solution generated using this tree may not be optimal, but it should at least be near-optimal with much fewer cells being processed by the algorithm, so if that would make the algorithm more likely to be tractable, then I guess that is an acceptable trade-off. I'm still stuck with thinking how exactly to generate a path for this, however.